Principal Investigator
Shaikshvali Chitraganti
Assistant Professor
IIT Palakkad
Team
Nandagopan, Aneesh S, Sudhina and Karthik S
Brief Details
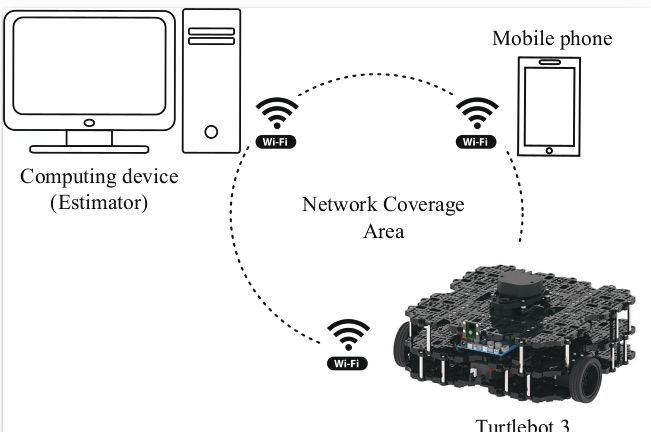
- Developing distributed state estimation algorithms in various noisy environments with energy efficient measurement transmissions for networked robots.
- Implement energy efficient control and estimation algorithms for networked robots.
- Testing of the developed setup in real time with application to aiding rescue missions in poor network terrains.
- Distributed state estimator and controller for coordinated tasks will benefit the rescue teams to carry out their rescue missions more effectively in poor network environments.
- Prototype control and estimation algorithm developed and in-house testing underway.